Predicción de Propiedades del Suelo usando Machine Learning: De la Teoría a la Práctica
Marco Hernandez
Introducción
La caracterización geotécnica tradicional requiere extensos ensayos de laboratorio que consumen tiempo y recursos. En este artículo exploraremos cómo los modelos de Machine Learning pueden predecir propiedades críticas del suelo como la resistencia al corte y la capacidad portante, utilizando datos más accesibles.
Disclaimer
Disclaimer Importante: Este código se encuentra en fase de revisión y validación. Puede contener errores, inconsistencias o comportamientos inesperados. Se recomienda encarecidamente:
- Realizar pruebas exhaustivas antes de usar en producción
- Validar resultados con métodos tradicionales de cálculo
- No utilizar para proyectos críticos sin verificación independiente
- Reportar problemas encontrados para mejora continua
Uso bajo responsabilidad del usuario final. Los autores no se hacen responsables de errores derivados de su implementación.
El Problema: Predicción de la Resistencia al Corte
Predecir el ángulo de fricción interna (φ) y la cohesión (c) del suelo es fundamental para el diseño de cimentaciones. Tradicionalmente esto requiere ensayos triaxiales costosos. Usaremos ML para predecir estos parámetros a partir de propiedades índice más fáciles de obtener.
Preparación del Dataset
Vamos a trabajar con un dataset que incluye:
- Inputs: Límite líquido (LL), Límite plástico (LP), Índice de plasticidad (IP), Contenido de humedad (w), Peso específico (γ), Granulometría
- Outputs: Ángulo de fricción (φ), Cohesión (c)
Código: Preparación de Datos
import pandas as pd
import numpy as np
from sklearn.model_selection import train_test_split
from sklearn.preprocessing import StandardScaler
import matplotlib.pyplot as plt
import seaborn as sns
# Simularemos un dataset geotécnico realista
np.random.seed(42)
def generar_dataset_geotecnico(n_samples=500):
"""
Genera un dataset sintético basado en correlaciones geotécnicas reales
"""
# Propiedades índice
limite_liquido = np.random.uniform(20, 80, n_samples)
limite_plastico = limite_liquido * np.random.uniform(0.4, 0.7, n_samples)
indice_plasticidad = limite_liquido - limite_plastico
contenido_humedad = np.random.uniform(10, 35, n_samples)
peso_especifico = np.random.uniform(16, 21, n_samples) # kN/m³
# Porcentaje de finos (pasa tamiz #200)
finos = np.random.uniform(5, 85, n_samples)
# Propiedades mecánicas (con correlaciones simplificadas)
# Ángulo de fricción: inversamente proporcional a la plasticidad
angulo_friccion = 40 - (indice_plasticidad * 0.3) + np.random.normal(0, 2, n_samples)
angulo_friccion = np.clip(angulo_friccion, 15, 42)
# Cohesión: directamente proporcional a la plasticidad
cohesion = (indice_plasticidad * 0.5) + (finos * 0.1) + np.random.normal(0, 3, n_samples)
cohesion = np.clip(cohesion, 0, 50) # kPa
df = pd.DataFrame({
'limite_liquido': limite_liquido,
'limite_plastico': limite_plastico,
'indice_plasticidad': indice_plasticidad,
'contenido_humedad': contenido_humedad,
'peso_especifico': peso_especifico,
'finos_pct': finos,
'angulo_friccion': angulo_friccion,
'cohesion': cohesion
})
return df
# Generar dataset
df = generar_dataset_geotecnico(500)
print("Dataset Geotécnico Generado:")
print(df.head())
print(f"\nDimensiones: {df.shape}")
print(f"\nEstadísticas descriptivas:")
print(df.describe())
Análisis Exploratorio
# Matriz de correlación
plt.figure(figsize=(12, 8))
correlation_matrix = df.corr()
sns.heatmap(correlation_matrix, annot=True, cmap='coolwarm', center=0)
plt.title('Matriz de Correlación - Propiedades Geotécnicas')
plt.tight_layout()
plt.savefig('correlacion_geotecnica.png', dpi=300)
plt.show()
# Visualización de relaciones clave
fig, axes = plt.subplots(2, 2, figsize=(14, 10))
axes[0, 0].scatter(df['indice_plasticidad'], df['angulo_friccion'], alpha=0.6)
axes[0, 0].set_xlabel('Índice de Plasticidad (%)')
axes[0, 0].set_ylabel('Ángulo de Fricción (°)')
axes[0, 0].set_title('IP vs Ángulo de Fricción')
axes[0, 1].scatter(df['indice_plasticidad'], df['cohesion'], alpha=0.6, color='orange')
axes[0, 1].set_xlabel('Índice de Plasticidad (%)')
axes[0, 1].set_ylabel('Cohesión (kPa)')
axes[0, 1].set_title('IP vs Cohesión')
axes[1, 0].scatter(df['finos_pct'], df['angulo_friccion'], alpha=0.6, color='green')
axes[1, 0].set_xlabel('Contenido de Finos (%)')
axes[1, 0].set_ylabel('Ángulo de Fricción (°)')
axes[1, 0].set_title('Finos vs Ángulo de Fricción')
axes[1, 1].scatter(df['peso_especifico'], df['angulo_friccion'], alpha=0.6, color='red')
axes[1, 1].set_xlabel('Peso Específico (kN/m³)')
axes[1, 1].set_ylabel('Ángulo de Fricción (°)')
axes[1, 1].set_title('Peso Específico vs Ángulo de Fricción')
plt.tight_layout()
plt.savefig('relaciones_geotecnicas.png', dpi=300)
plt.show()
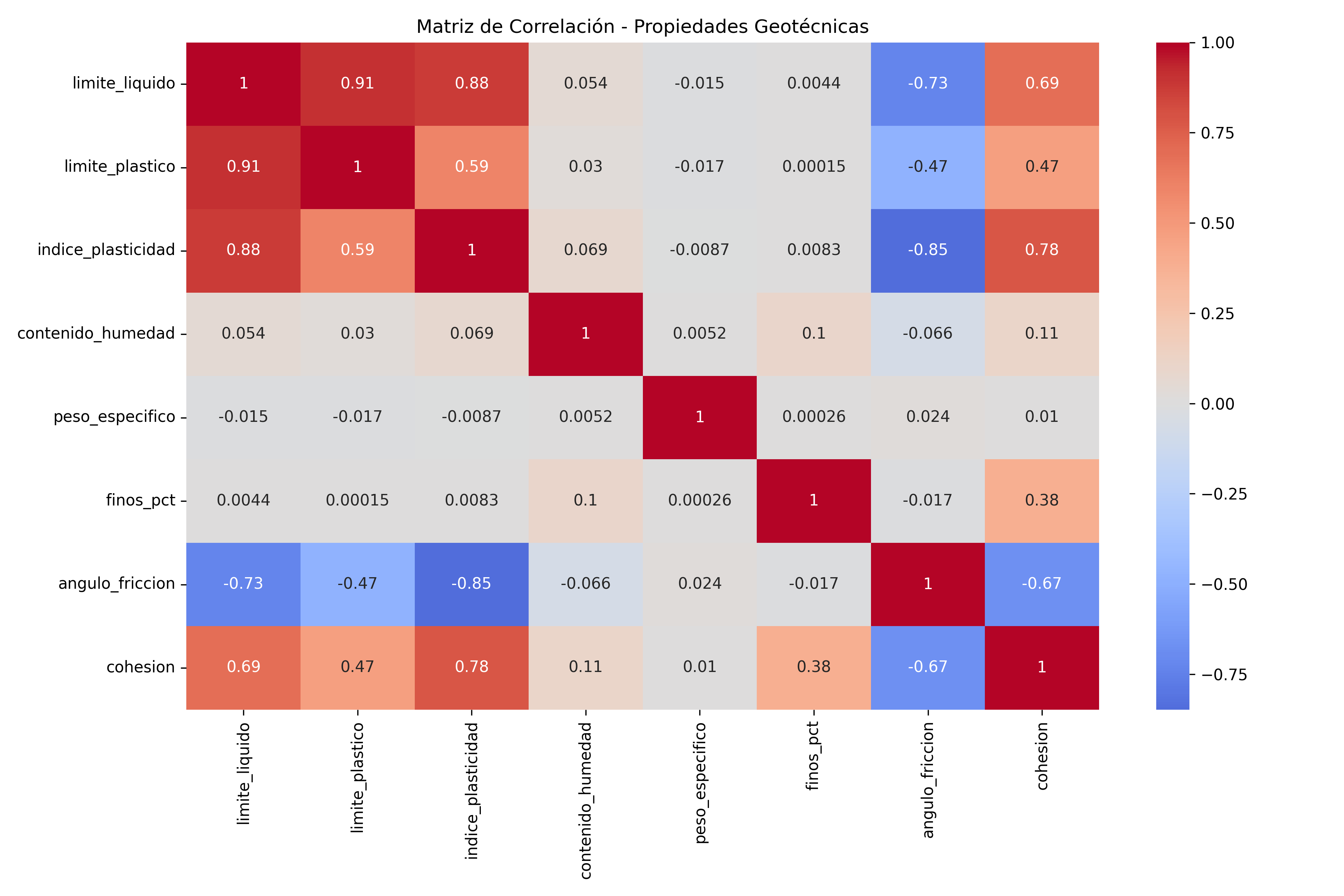
Matriz de Correlación - Propiedades Geotécnicas
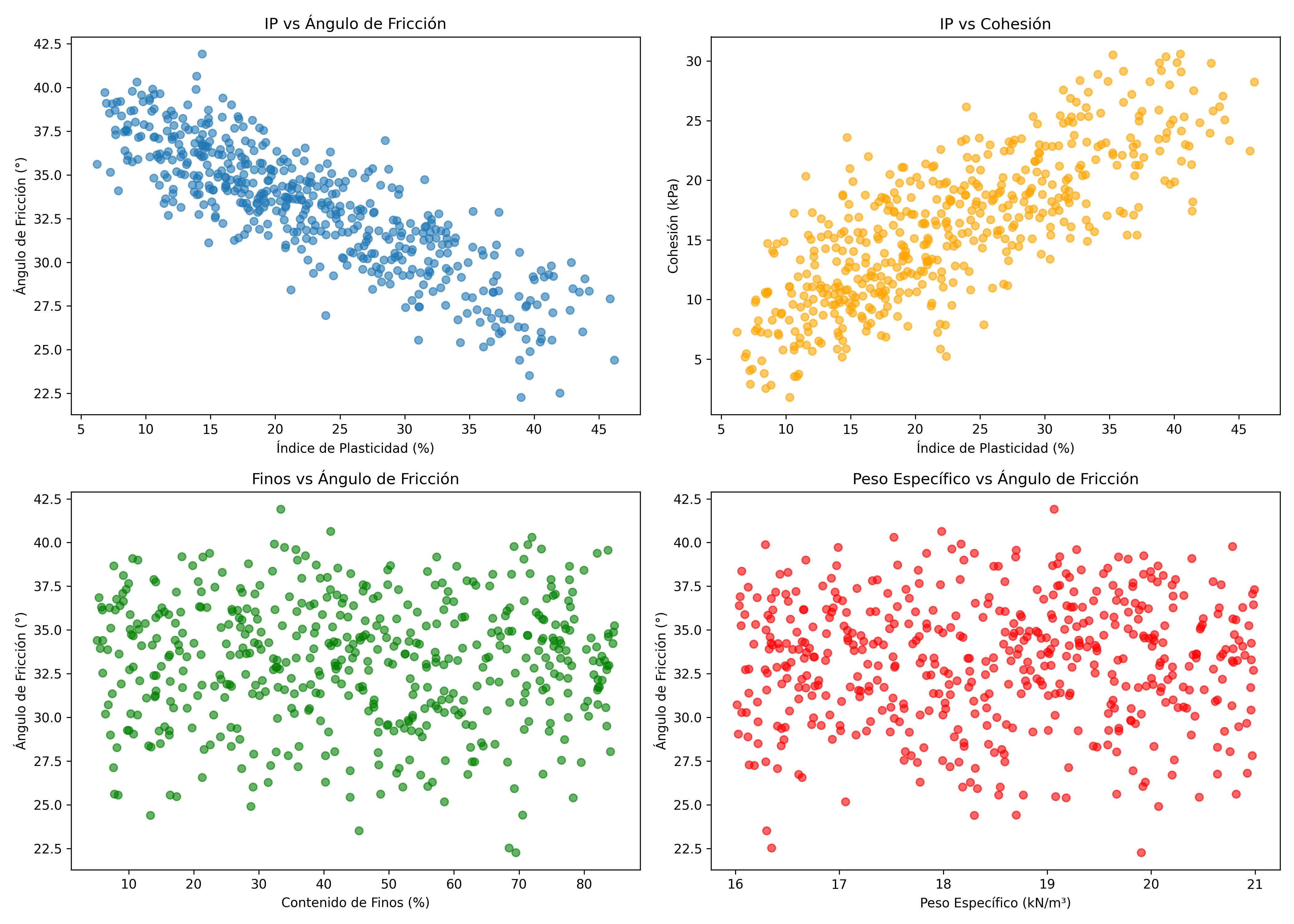
Relaciones Geotecnicas
Implementación de Modelos
Modelo 1: Random Forest
from sklearn.ensemble import RandomForestRegressor
from sklearn.metrics import mean_squared_error, r2_score, mean_absolute_error
# Preparar datos
features = ['limite_liquido', 'limite_plastico', 'indice_plasticidad',
'contenido_humedad', 'peso_especifico', 'finos_pct']
X = df[features]
y_friccion = df['angulo_friccion']
y_cohesion = df['cohesion']
# Split datos
X_train, X_test, y_fric_train, y_fric_test = train_test_split(
X, y_friccion, test_size=0.2, random_state=42
)
X_train, X_test, y_coh_train, y_coh_test = train_test_split(
X, y_cohesion, test_size=0.2, random_state=42
)
# Normalización
scaler = StandardScaler()
X_train_scaled = scaler.fit_transform(X_train)
X_test_scaled = scaler.transform(X_test)
# Modelo Random Forest para Ángulo de Fricción
rf_friccion = RandomForestRegressor(
n_estimators=200,
max_depth=15,
min_samples_split=5,
min_samples_leaf=2,
random_state=42,
n_jobs=-1
)
rf_friccion.fit(X_train_scaled, y_fric_train)
y_fric_pred = rf_friccion.predict(X_test_scaled)
# Métricas
print("=" * 60)
print("MODELO RANDOM FOREST - ÁNGULO DE FRICCIÓN")
print("=" * 60)
print(f"R² Score: {r2_score(y_fric_test, y_fric_pred):.4f}")
print(f"RMSE: {np.sqrt(mean_squared_error(y_fric_test, y_fric_pred)):.4f}°")
print(f"MAE: {mean_absolute_error(y_fric_test, y_fric_pred):.4f}°")
# Modelo para Cohesión
rf_cohesion = RandomForestRegressor(
n_estimators=200,
max_depth=15,
min_samples_split=5,
min_samples_leaf=2,
random_state=42,
n_jobs=-1
)
rf_cohesion.fit(X_train_scaled, y_coh_train)
y_coh_pred = rf_cohesion.predict(X_test_scaled)
print("\n" + "=" * 60)
print("MODELO RANDOM FOREST - COHESIÓN")
print("=" * 60)
print(f"R² Score: {r2_score(y_coh_test, y_coh_pred):.4f}")
print(f"RMSE: {np.sqrt(mean_squared_error(y_coh_test, y_coh_pred)):.4f} kPa")
print(f"MAE: {mean_absolute_error(y_coh_test, y_coh_pred):.4f} kPa")
# Importancia de características
importancias_fric = pd.DataFrame({
'Feature': features,
'Importance': rf_friccion.feature_importances_
}).sort_values('Importance', ascending=False)
print("\nImportancia de Características (Ángulo de Fricción):")
print(importancias_fric)
Modelo 2: Red Neuronal con TensorFlow/Keras
import tensorflow as tf
from tensorflow import keras
from tensorflow.keras import layers, callbacks
# Construir arquitectura de red neuronal
def crear_modelo_nn(input_dim):
model = keras.Sequential([
layers.Input(shape=(input_dim,)),
layers.Dense(64, activation='relu'),
layers.Dropout(0.3),
layers.Dense(32, activation='relu'),
layers.Dropout(0.2),
layers.Dense(16, activation='relu'),
layers.Dense(1, activation='linear')
])
model.compile(
optimizer=keras.optimizers.Adam(learning_rate=0.001),
loss='mse',
metrics=['mae']
)
return model
# Callbacks
early_stop = callbacks.EarlyStopping(
monitor='val_loss',
patience=20,
restore_best_weights=True
)
reduce_lr = callbacks.ReduceLROnPlateau(
monitor='val_loss',
factor=0.5,
patience=10,
min_lr=0.00001
)
# Modelo para Ángulo de Fricción
nn_friccion = crear_modelo_nn(X_train_scaled.shape[1])
print("\nArquitectura del Modelo Neural:")
nn_friccion.summary()
history_fric = nn_friccion.fit(
X_train_scaled, y_fric_train,
validation_split=0.2,
epochs=200,
batch_size=32,
callbacks=[early_stop, reduce_lr],
verbose=0
)
# Predicciones
y_fric_pred_nn = nn_friccion.predict(X_test_scaled, verbose=0).flatten()
print("\n" + "=" * 60)
print("MODELO NEURAL NETWORK - ÁNGULO DE FRICCIÓN")
print("=" * 60)
print(f"R² Score: {r2_score(y_fric_test, y_fric_pred_nn):.4f}")
print(f"RMSE: {np.sqrt(mean_squared_error(y_fric_test, y_fric_pred_nn)):.4f}°")
print(f"MAE: {mean_absolute_error(y_fric_test, y_fric_pred_nn):.4f}°")
# Modelo para Cohesión
nn_cohesion = crear_modelo_nn(X_train_scaled.shape[1])
history_coh = nn_cohesion.fit(
X_train_scaled, y_coh_train,
validation_split=0.2,
epochs=200,
batch_size=32,
callbacks=[early_stop, reduce_lr],
verbose=0
)
y_coh_pred_nn = nn_cohesion.predict(X_test_scaled, verbose=0).flatten()
print("\n" + "=" * 60)
print("MODELO NEURAL NETWORK - COHESIÓN")
print("=" * 60)
print(f"R² Score: {r2_score(y_coh_test, y_coh_pred_nn):.4f}")
print(f"RMSE: {np.sqrt(mean_squared_error(y_coh_test, y_coh_pred_nn)):.4f} kPa")
print(f"MAE: {mean_absolute_error(y_coh_test, y_coh_pred_nn):.4f} kPa")
Visualización de Resultados
# Comparación de predicciones
fig, axes = plt.subplots(2, 2, figsize=(14, 10))
# Random Forest - Fricción
axes[0, 0].scatter(y_fric_test, y_fric_pred, alpha=0.6)
axes[0, 0].plot([y_fric_test.min(), y_fric_test.max()],
[y_fric_test.min(), y_fric_test.max()], 'r--', lw=2)
axes[0, 0].set_xlabel('Ángulo de Fricción Real (°)')
axes[0, 0].set_ylabel('Predicción RF (°)')
axes[0, 0].set_title(f'Random Forest - Fricción (R²={r2_score(y_fric_test, y_fric_pred):.3f})')
axes[0, 0].grid(True, alpha=0.3)
# Neural Network - Fricción
axes[0, 1].scatter(y_fric_test, y_fric_pred_nn, alpha=0.6, color='orange')
axes[0, 1].plot([y_fric_test.min(), y_fric_test.max()],
[y_fric_test.min(), y_fric_test.max()], 'r--', lw=2)
axes[0, 1].set_xlabel('Ángulo de Fricción Real (°)')
axes[0, 1].set_ylabel('Predicción NN (°)')
axes[0, 1].set_title(f'Neural Network - Fricción (R²={r2_score(y_fric_test, y_fric_pred_nn):.3f})')
axes[0, 1].grid(True, alpha=0.3)
# Random Forest - Cohesión
axes[1, 0].scatter(y_coh_test, y_coh_pred, alpha=0.6, color='green')
axes[1, 0].plot([y_coh_test.min(), y_coh_test.max()],
[y_coh_test.min(), y_coh_test.max()], 'r--', lw=2)
axes[1, 0].set_xlabel('Cohesión Real (kPa)')
axes[1, 0].set_ylabel('Predicción RF (kPa)')
axes[1, 0].set_title(f'Random Forest - Cohesión (R²={r2_score(y_coh_test, y_coh_pred):.3f})')
axes[1, 0].grid(True, alpha=0.3)
# Neural Network - Cohesión
axes[1, 1].scatter(y_coh_test, y_coh_pred_nn, alpha=0.6, color='purple')
axes[1, 1].plot([y_coh_test.min(), y_coh_test.max()],
[y_coh_test.min(), y_coh_test.max()], 'r--', lw=2)
axes[1, 1].set_xlabel('Cohesión Real (kPa)')
axes[1, 1].set_ylabel('Predicción NN (kPa)')
axes[1, 1].set_title(f'Neural Network - Cohesión (R²={r2_score(y_coh_test, y_coh_pred_nn):.3f})')
axes[1, 1].grid(True, alpha=0.3)
plt.tight_layout()
plt.savefig('comparacion_modelos.png', dpi=300)
plt.show()
# Curvas de aprendizaje
fig, axes = plt.subplots(1, 2, figsize=(14, 5))
axes[0].plot(history_fric.history['loss'], label='Training Loss')
axes[0].plot(history_fric.history['val_loss'], label='Validation Loss')
axes[0].set_xlabel('Época')
axes[0].set_ylabel('Loss (MSE)')
axes[0].set_title('Curva de Aprendizaje - Ángulo de Fricción')
axes[0].legend()
axes[0].grid(True, alpha=0.3)
axes[1].plot(history_coh.history['loss'], label='Training Loss')
axes[1].plot(history_coh.history['val_loss'], label='Validation Loss')
axes[1].set_xlabel('Época')
axes[1].set_ylabel('Loss (MSE)')
axes[1].set_title('Curva de Aprendizaje - Cohesión')
axes[1].legend()
axes[1].grid(True, alpha=0.3)
plt.tight_layout()
plt.savefig('curvas_aprendizaje.png', dpi=300)
plt.show()
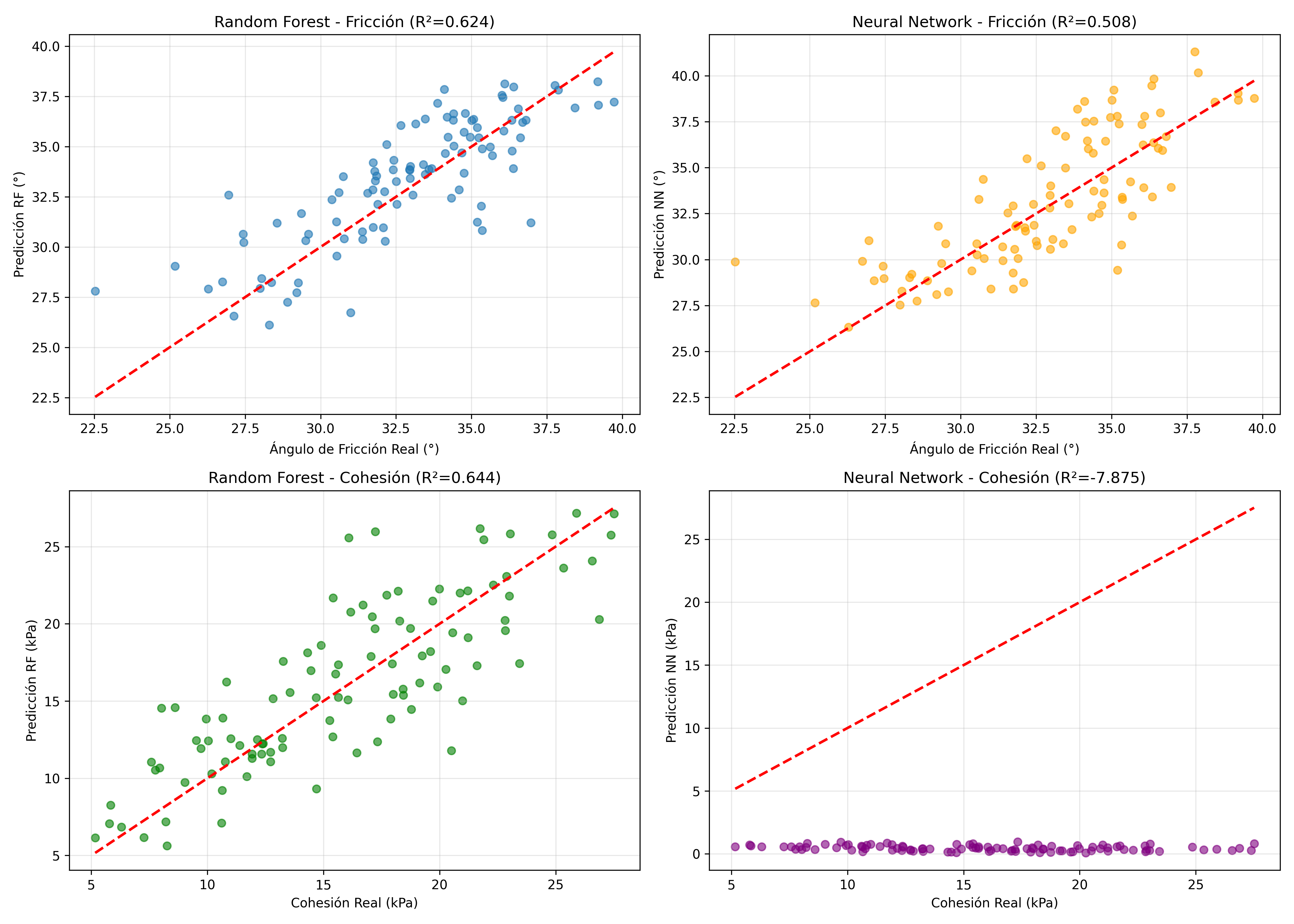
Comparacion de modelos
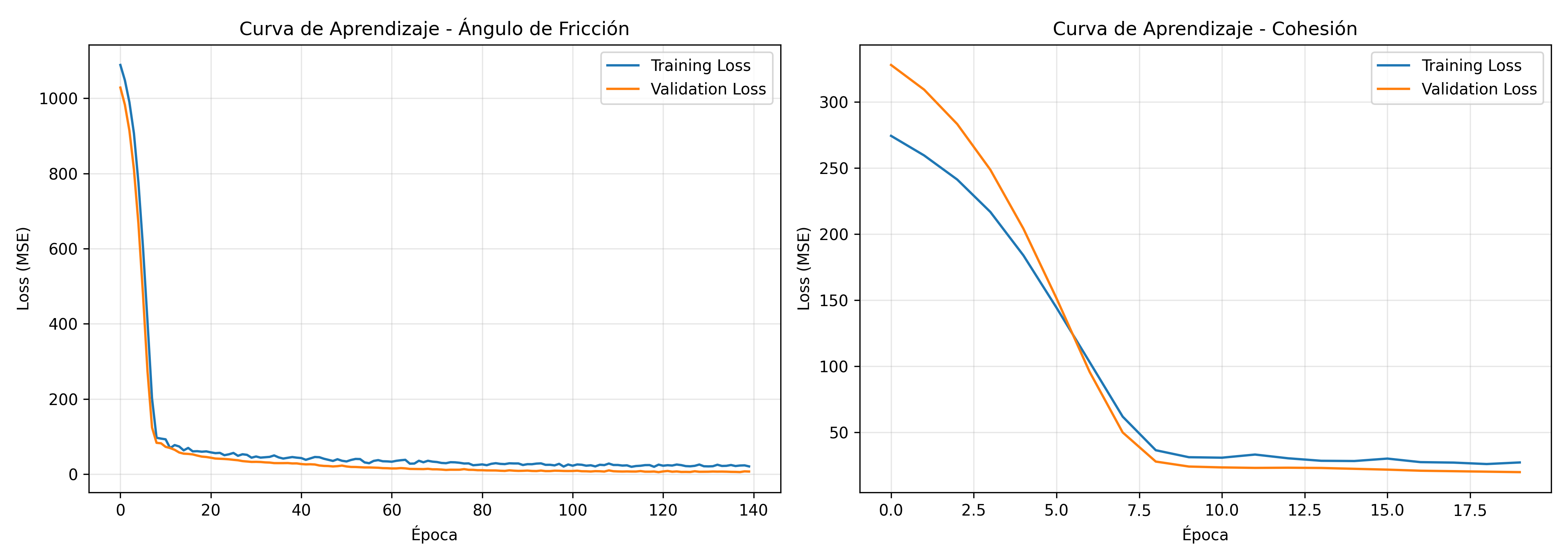
Curvas de aprendizaje
Aplicación Práctica: Predicción de Nuevas Muestras
def predecir_propiedades_suelo(limite_liq, limite_plas, humedad,
peso_esp, finos, modelo_fric, modelo_coh, scaler):
"""
Predice ángulo de fricción y cohesión para una nueva muestra de suelo
"""
indice_plas = limite_liq - limite_plas
muestra = np.array([[limite_liq, limite_plas, indice_plas, humedad, peso_esp, finos]])
muestra_scaled = scaler.transform(muestra)
friccion = modelo_fric.predict(muestra_scaled)[0]
cohesion = modelo_coh.predict(muestra_scaled)[0]
return friccion, cohesion
# Ejemplo de uso
print("\n" + "=" * 60)
print("PREDICCIÓN DE NUEVA MUESTRA")
print("=" * 60)
# Datos de una nueva muestra
nueva_muestra = {
'LL': 45.0,
'LP': 25.0,
'w': 22.0,
'γ': 18.5,
'finos': 60.0
}
fric_pred, coh_pred = predecir_propiedades_suelo(
nueva_muestra['LL'],
nueva_muestra['LP'],
nueva_muestra['w'],
nueva_muestra['γ'],
nueva_muestra['finos'],
rf_friccion,
rf_cohesion,
scaler
)
print(f"\nCaracterísticas de entrada:")
print(f" Límite Líquido: {nueva_muestra['LL']}%")
print(f" Límite Plástico: {nueva_muestra['LP']}%")
print(f" Índice de Plasticidad: {nueva_muestra['LL'] - nueva_muestra['LP']}%")
print(f" Contenido de Humedad: {nueva_muestra['w']}%")
print(f" Peso Específico: {nueva_muestra['γ']} kN/m³")
print(f" Contenido de Finos: {nueva_muestra['finos']}%")
print(f"\nPredicciones:")
print(f" Ángulo de Fricción: {fric_pred:.2f}°")
print(f" Cohesión: {coh_pred:.2f} kPa")
Guardando los Modelos
import joblib
# Guardar modelos
joblib.dump(rf_friccion, 'modelo_friccion_rf.pkl')
joblib.dump(rf_cohesion, 'modelo_cohesion_rf.pkl')
joblib.dump(scaler, 'scaler_geotecnico.pkl')
nn_friccion.save('modelo_friccion_nn.h5')
nn_cohesion.save('modelo_cohesion_nn.h5')
print("\n✓ Modelos guardados exitosamente")
Conclusiones y Recomendaciones
Ventajas de los Modelos ML en Geotecnia
- Reducción de costos: Menos ensayos de laboratorio costosos
- Velocidad: Predicciones instantáneas vs días de espera
- Escalabilidad: Pueden procesar miles de muestras rápidamente
- Detección de patrones: Identifican relaciones no lineales complejas
Limitaciones y Precauciones
- Calidad de datos: Los modelos son tan buenos como los datos de entrenamiento
- Extrapolación: No usar fuera del rango de entrenamiento
- Validación: Siempre validar con ensayos de laboratorio en proyectos críticos
- Interpretabilidad: Las redes neuronales son “cajas negras”
Mejores Prácticas
- Mantener un dataset actualizado con nuevos ensayos
- Realizar validación cruzada exhaustiva
- Documentar los rangos de aplicabilidad del modelo
- Combinar con juicio ingenieril experimentado
- Actualizar modelos periódicamente con nuevos datos
Autor: Ing. Marco A. Hernández. Ingeniero Geologo. Universidad Central de Venezuela. 2006-2025. Linkedin